Atmospheric Remote Sensing: Instruments
FLOE Measurements
The Oceanographic Lidar and associated instruments have been used in a number of studies observing a diverse range of ocean characteristics. The instrumentation is owned and operated by NOAA, but these studies have been partially supported by other organizations and we are always looking for applications and collaborations.
Fish
"How many fish are there?" is an important question in managing any fishery. Traditional methods of answering this question include direct sampling, egg sampling, sonar survey, and aerial survey. Each has its limitations. Perhaps the most severe limitation of the surface-based techniques like sampling and sonar is that ships are slow. Only a small fraction of the possible habitat can be surveyed, and the cost is high. Aerial surveys can cover a much larger area of the ocean, but the data are less reliable. The data consist of estimates made by expert observers; the accuracy of these estimates varies from observer to observer and also from day to day as surface and illumination conditions change.
Because of the limited penetration depth, lidar is most effective when surveying fish that live near the surface. Those that have been successfully surveyed include menhaden (Churnside et al., 2011), sardines (Reese et al., 2011, Churnside et al., 2009 , Carrera et al., 2006, Churnside and Wilson, 2001, Churnside et al., 1997), mackerel (Churnside et al., 2009, Carrera et al., 2006), salmon (Churnside and Wilson, 2004), mullet (Churnside et al., 2003), capelin (Brown et al., 2002), anchovies (Churnside and Wilson, 2001, Lo et al., 2000 ), herring (Churnside et al., 2011), squid, flying fish (Churnside et al., 2017), trout (Roddewig, et al., 2018), and jellyfish (Churnside, et al., 2016). The agreement between lidar results and more traditional echosounder results is good if both instruments cover the same area at the same time, and gets progressively worse is several days elapse. To get this agreement, the lidar data must be thresholded in some fashion to remove the return from background scattering levels.
For survey purposes, we would like to convert the lidar signal into a depth profile of the biomass density for each species. This means that we need to know the reflectivity of each target species and we need to be able to identify the species responsible for our signals. At this time, laser reflectivity measurements have been made on three species of live fish: sardines (Churnside et al., 1997), mackerel (Tenningen et al., 2006), and menhaden. Other species have been measured using frozen fish in the laboratory (Churnside et al., 1991).
Species identification cannot be done unambiguously using only the lidar signals, and other clues must be considered. The lidar can tell the difference between large fish like tuna and salmon and small fish like sardines and herring. The habitat being surveyed generally eliminates most species from consideration. The most important factors are depth in the water column and latitude. In many cases, we rely on visual observations from the air and on ship reports. In these cases, we have to assume that the distribution of species is similar where we do not have this information.
Zooplankton
The NOAA lidar has been used to survey fish more often than zooplankton, but we did perform a systematic survey of copepods of the genus Neocalanus in Prince William Sound, Alaska (Churnside and Thorne, 2005). Using a technique common in acoustics, we applied a threshold to the lidar data to remove the return from low-level scatterers. Since the lidar target strength of plankton has yet to be measured directly, we varied the threshold level and compared the results with the acoustic results in the 8 areas. The best agreement was found with a threshold level of 2.75, relative to the background scattering level. With this threshold, the correlation between the lidar and echosounder results was 0.78.

We also discovered an intense foraging event in the Bering Sea (Churnside et al., 2011) that was based on a layer of Euphausiids detected by the lidar. These were being eaten by fish, whales and sea birds over a period of several days.

Phytoplankton
Remote sensing of phytoplankton, responsible for the primary productivity of the ocean, has historically been by satellite-based radiometers looking at ocean color. With similar sensors, we have demonstrated similar ocean color measurements from low flying aircraft (Churnside and Wilson, 2008), which requires a different algorithm for the atmospheric correction, but provides much finer spatial resolution. We have also used lidar profiles to investigate the effects of a non-uniform vertical distribution of phytoplankton on ocean color measurements (Montes-Hugo et al., 2011, Montes-Hugo et al., 2010).
Phytoplankton are also responsible for Harmful Algal Blooms (HABs). In August of 2014, we examined the vertical structure of a cyanobacteria bloom across the western basin of Lake Erie with airborne lidar (Moore et al., 2019). The vertical structure of the overall cyanobacteria population was influenced by wind speed, and to a lesser degree the solar heating of surface waters. On a more detailed level, Microcystis populations were consistently nearer to the surface relative to Planktothrix. These are both HABs, but the latter is more of a threat to subsurface drinking water intakes in the lake.
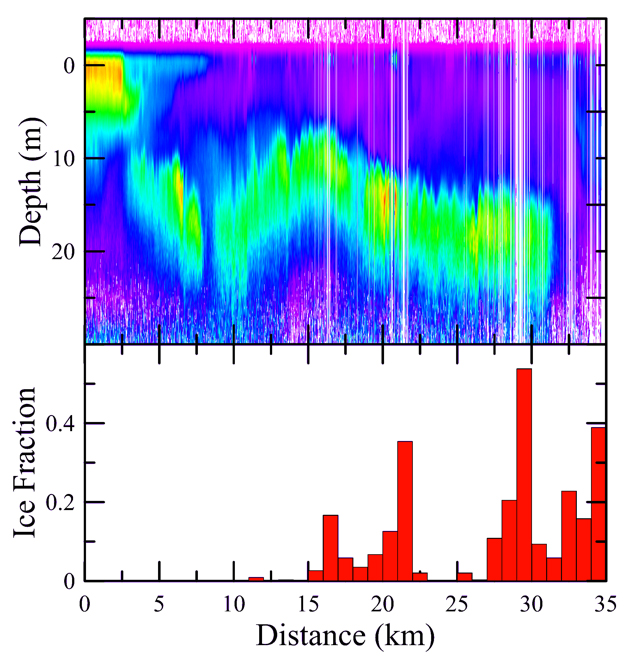
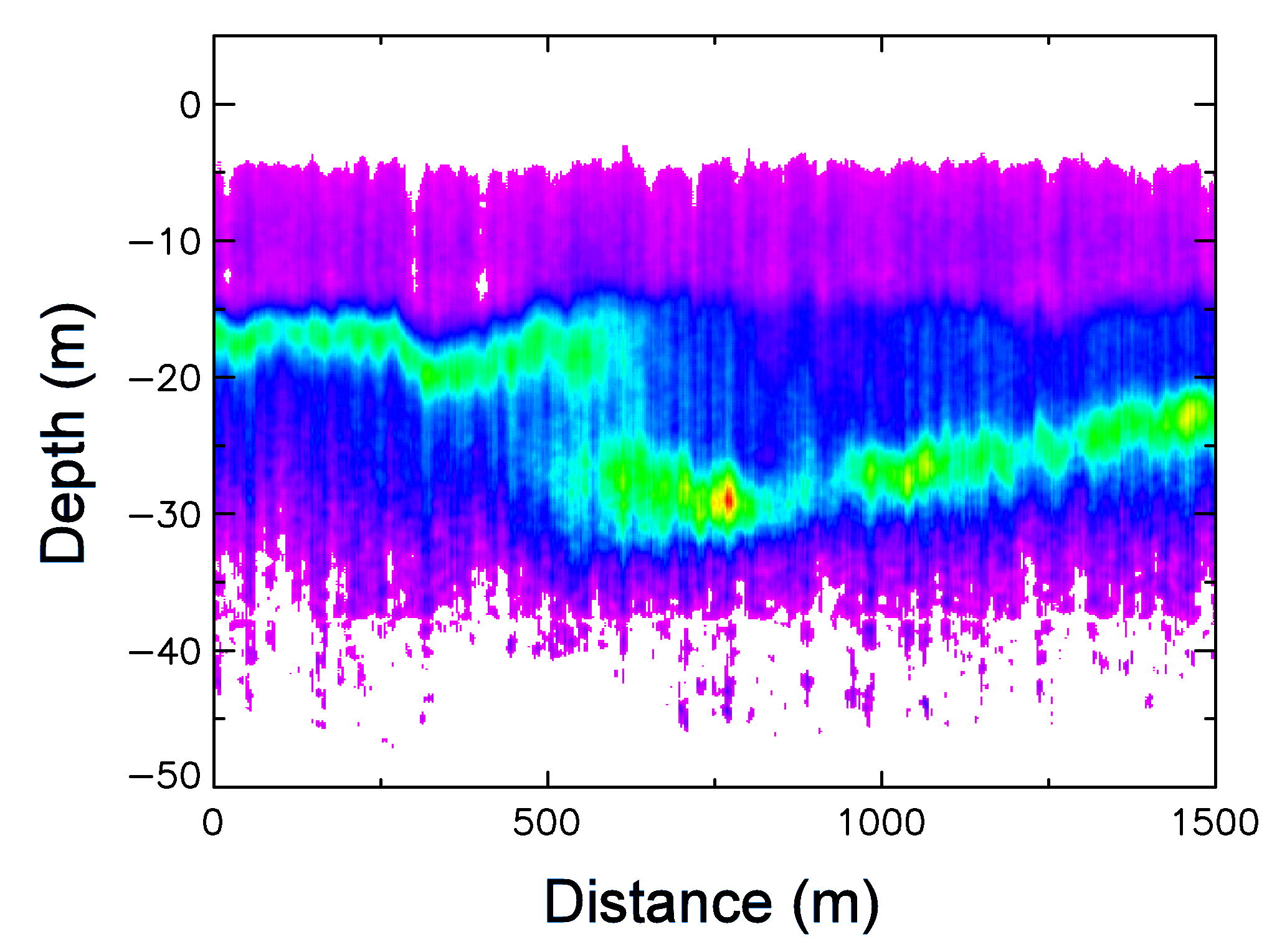
One exciting result of the lidar data has been to demonstrate the wide distribution of thin (> 3 m) plankton layers that form under a variety of conditions (Churnside and Donaghay, 2009, Churnside and Marchbanks, 2015, Churnside et al., 2020). These conditions include upwelling, fresh-water influx, and warm-core eddies, and melting sea ice. The reason for the excitement is that these thin layers act to concentrate the chemical (nutrients) and biological (phytoplankton, but also zooplankton and fish larvae), which has a profound influence on the primary (photosynthesis) and secondary (grazing) productivity. More work is needed to understand how climate changes might change these processes through changes in the stratification of the oceans.
Whales
Generally, aerial surveys of whales and other marine mammals have been accomplished using expert observers and visible imagery. The addition of lidar and radiometers to these surveys would provide valuable information about the environment to increase our understanding of why the distribution of animals is what it is. Our best example is the observation of a forage event in the Bering Sea (Churnside et al., 2011). Fifty two humpback whales were observed in a small area, along with thousands of sea birds (shearwaters). The lidar was able to show that the reason for this aggregation was a dense layer of zooplankton that was at the surface in an attempt to avoid predation from below by schools of herring.
Large marine mammals are also directly detected by the lidar. Without visual confirmation, identification from the lidar signal alone is impossible. The lidar does provide a depth distribution of animals from which a correction to visual counts can be estimated.
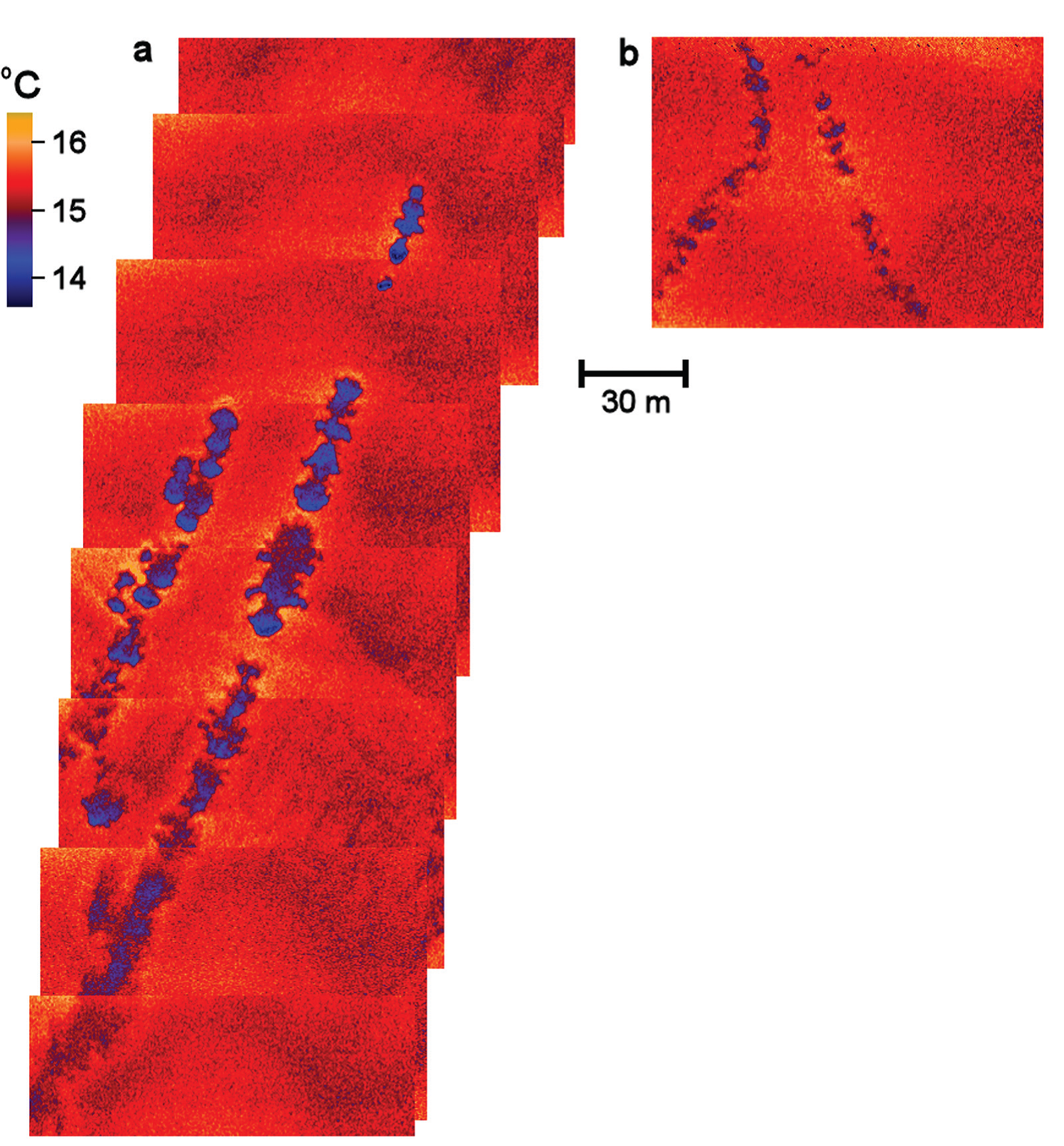
One disadvantage to visual surveys is that they can only be done during daylight hours, and nighttime distributions may be different. In infrared images, however, the tracks of whales can be seen, even when the animals themselves cannot (Churnside et al., 2009).
Figure: (a) A composite of eight nonsequential frames taken from a little less than 2 s of daytime thermal video. The visible camera showed two adult whales, just in front of the two clearest thermal tracks, that were traveling toward the top of the image. A third track can be seen very close to the left of the track of the second whale. This animal, not seen in the visible image, may have been a calf following its mother. (b) A composite of two frames from a nighttime (100 minutes after sunset) flight showing two whales coming together and traveling toward the top of the image.
Plastics
There is a vast amount of plastic debris in the ocean, in part because it can persist for many years. Of particular concern are ghost nets, lost or abandoned fishing gear that drifts in the ocean continuing to catch fish and entangle marine mammals, turtles, and sea birds. Many of these end up trapped on the coral reefs, where entanglement rates are even higher than in the open ocean and where they damage the fragile coral. Another concern is the debris from the 2011 Japanese tsunami, which is washing up on the west coast of the US and Canada.
Aerial surveys (Pichel et al., 2012, Veenstra et al., 2012, Pichel et al., 2007) can be effective in locating this debris at sea, before it impacts coastal regions. We have shown that many of these nets pass through the Sub-Tropical Convergence Zone north of the Hawaiian Islands in the spring of each year when the convergence is particularly strong. Oceanic debris of all types is expected to accumulate here and in other convergence zones. For this reason, searching for ghost nets and other debris in convergence zones was expected to be more efficient than searching the entire ocean. The effectiveness of this approach has been demonstrated in the North Pacific, and the figure shows the density of debris observed. Sea birds and marine mammals were also concentrated in these convergence areas (Pichel et al., 2007) which are regions of high productivity. This makes them particularly vulnerable to entanglement.
Lidar should be particularly effective in detecting dispersed oil near the surface caused by offshore oil spills. The sheen from oil on the surface is easy to see visually from an aircraft, but when dispersants are applied, as was the case of the Deepwater Horizon event, the oil is broken up into tiny droplets that are more difficult to detect. It has yet to be demonstrated, but it is clear that this layer can be detected with lidar and that the spherical oil droplets can be separated from plankton by the polarization characteristics of the return.
Physical and Optical Properties of the Ocean
Studies of the physical properties of the ocean with lidar and associated instrumentation have been done in several ways.
We have looked at how the lidar return depends on the optical properties of the water using comparisons with in-situ optical measurements (Churnside et al., 2017, Lee et al., 2013, Churnside et al., 1998), direct measurements of polarization components (Churnside et al., 2012, Churnside, 2008, Churnside et al., 1998), and theoretical studies (Churnside, 2008, Mitra and Churnside, 1999). One interesting outcome of these investigations is that there seems to be no difference in contrast between linear and circular polarization as long as the orthogonal polarization is used to detect plankton layers (Churnside et al., 2012). A study on the lidar return from bubbles in the ocean demonstrated that the return will be proportional to the bubble void fraction, independent of the bubbles size distribution (Churnside, 2010). As a result, whale vocalizations, which affect bubble size, can be measured with an airborne lidar (Churnside et al., 2015).
We have used thin plankton layers at the pycnocline (Churnside and Donaghay, 2009) as tracers of the pycnocline to measure oceanic structure, including abrupt changes in depth and internal waves in coastal waters (Churnside et al., 2012) and in the open ocean (Churnside and Ostrovsky, 2005).
We have used the optical scattering from the sea surface to investigate characteristics of the roughened surface using laser sources (Churnside et al., 2008, Walsh et al., 2005, Shaw and Churnside, 1997, Shaw and Churnside, 1997) and images taken in natural light (Walsh et al., 2005), including the small changes caused by underwater sound (Churnside et al., 2008). We have also used the subsurface lidar return to investigate the statistics of variable scattering in the ocean (Churnside and Donaghay, 2009, Churnside and Wilson, 2006, Churnside et al., 1998).